Reaktif Güç Kontrol Rölesi
Reaktif Güç Kontrol Rölesi Endüktif Yük Sürücüsü
Endüktif Yük Sürücüsü Kondansatör
Kondansatör Monofaze Kondansatör
Monofaze Kondansatör Kompanzasyon Kontaktörü
Kompanzasyon Kontaktörü Akım Trafoları
Akım Trafoları Barasız
Barasız Şönt Reaktör
Şönt Reaktör Trifaze Şönt Reaktör
Trifaze Şönt Reaktör
 Enerji Analizörü
Enerji Analizörü Multimetre
Multimetre Ray Tipi
Ray Tipi Haberleşme Modemi
Haberleşme Modemi Ethernet Kablolu
Ethernet Kablolu Kablosuz Haberleşme
Kablosuz Haberleşme
 Motor(Faz)Koruma Rölesi
Motor(Faz)Koruma Rölesi Dijital Röle
Dijital Röle Dijital Koruma
Dijital Koruma Gerilim Koruma Rölesi
Gerilim Koruma Rölesi Zaman Röleleri
Zaman Röleleri Astronomik Zaman Saati
Astronomik Zaman Saati Dijital Zaman Rölesi
Dijital Zaman Rölesi Flaşör Rölesi
Flaşör Rölesi Çok Fonksiyonlu Zaman Rölesi
Çok Fonksiyonlu Zaman Rölesi Otomatik Sigorta
Otomatik Sigorta 1 Kutuplu
1 Kutuplu Kontaktör
Kontaktör Düşük Akım Koruma Rölesi
Düşük Akım Koruma Rölesi
 Dalgıç Pompa Kontrol Rölesi
Dalgıç Pompa Kontrol Rölesi Dijital Sayıcılar
Dijital Sayıcılar Fotosel Röleleri
Fotosel Röleleri Hidrofor Sıralama Rölesi
Hidrofor Sıralama Rölesi Sıcaklık Kontrol Rölesi
Sıcaklık Kontrol Rölesi Klasik
Klasik Kumanda Kontrol Röleleri
Kumanda Kontrol Röleleri Dijital Röle
Dijital Röle Multifonksiyonlu Zaman Rölesi
Multifonksiyonlu Zaman RölesiPLC VE ÖZELLİKLERİ

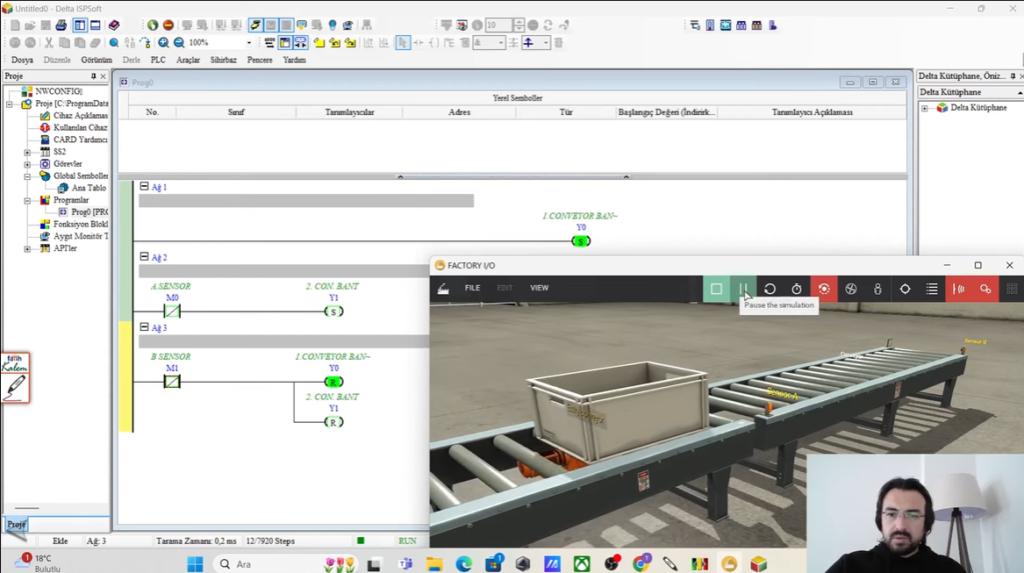
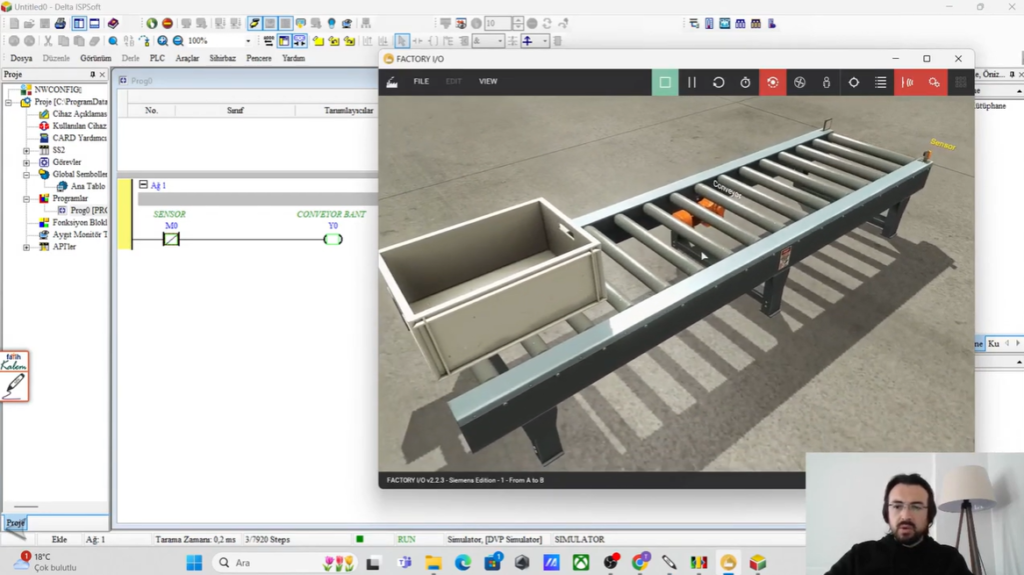
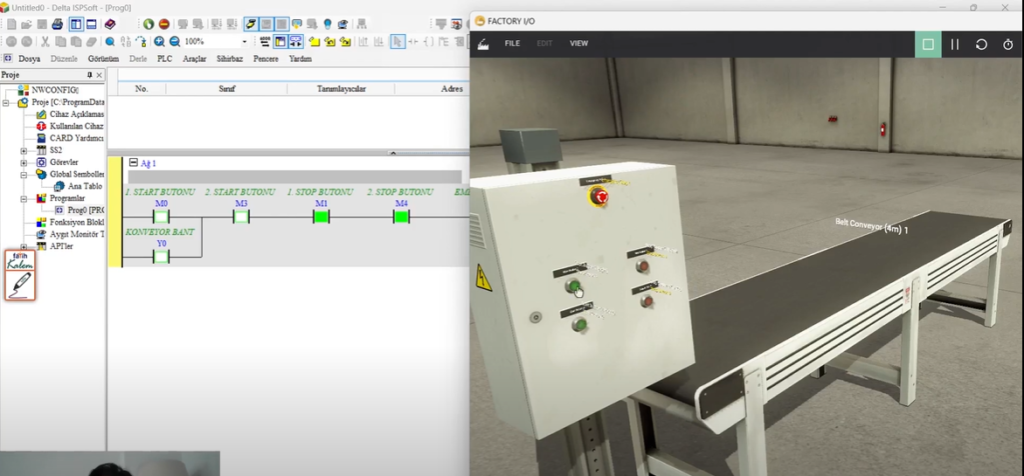
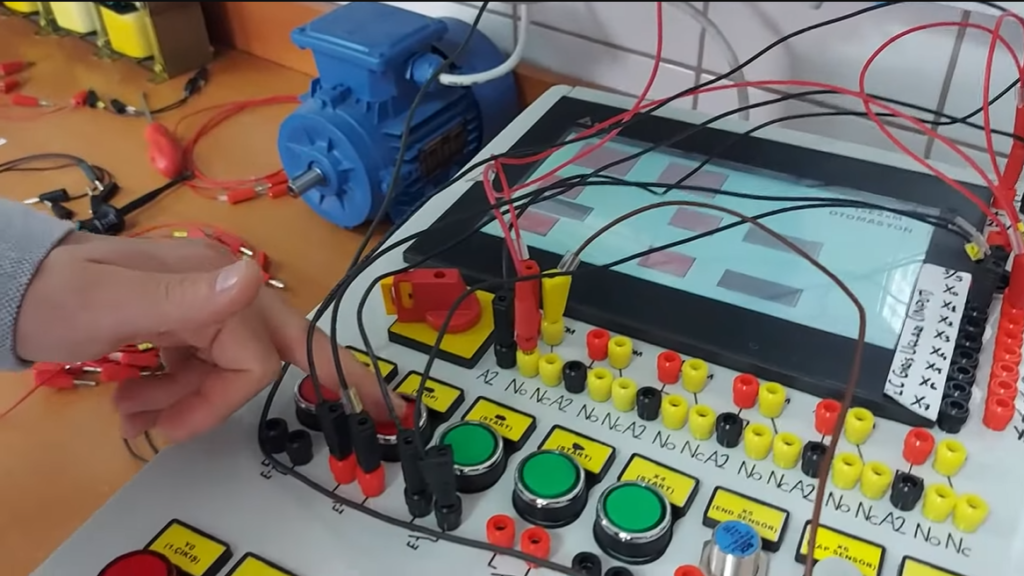
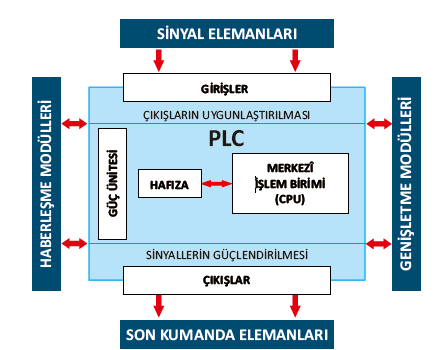
PLC Girişlerine uygulanan sinyalleri algılayıp, yazılımıyla işleyerek istenen çalışma şartlarını gerçekleştirmek için çıkışlarını yönlendiren süreç kontrol cihazlarına PLC (Programlanabilir Lojik Kontrolör) denir
(Görsel 2.1). PLC’ler endüstriyel ortamlarda (nemli, tozlu, gürültülü, titreşimli vb.) güvenle çalışmak amacıyla tasarlanmıştır.

PLC’ler klasik kumanda sistemlerinin yapğı kontrolü, yazılım kullanarak daha az elemanla ve üst
seviyede gerçekleştirir.
PLC’nin klasik kumanda devrelerine göre üstünlükleri şunlardır:
-Az yer kaplar.
-Az arıza yapar ve bakımı kolaydır.
-Arıza ve hata tespitleri yazılım üzerinden yaparız.
– Enerji tüketimi düşüktür.
-Düşük güçlerle büyük güçlü sistemler kontrol ederiz.
– Değişen uygulamalara kolaylıkla uyum sağlarız.
Bilgisayar ile iletişim kurarak PC üzerinden kontrol sağlarız.
-Ek modüller ile genişletiriz.
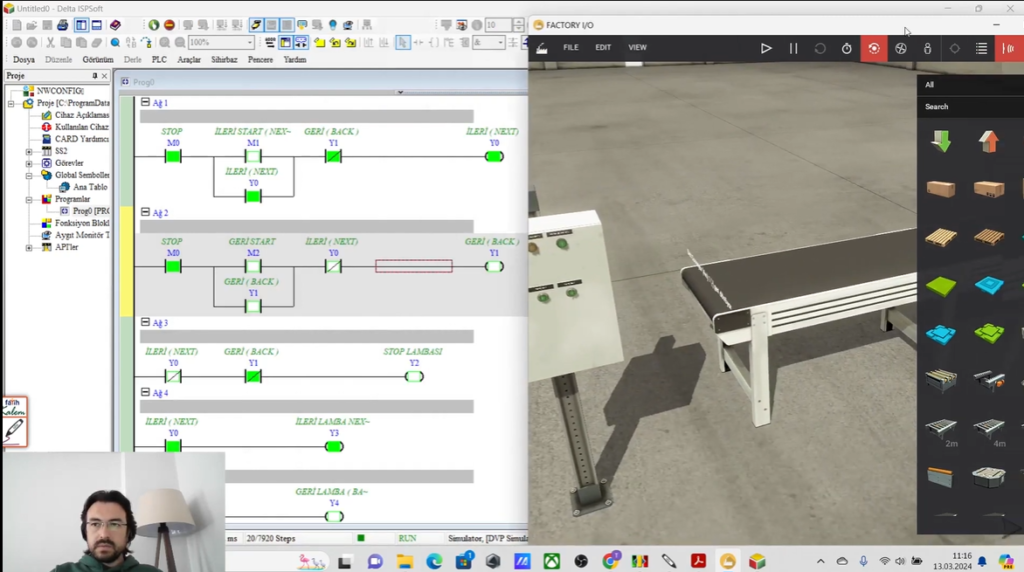
PLC’lerin kullanım alanları oldukça geniştir. Endüstriyel uygulamalarda sıralı kontrol, hareket kontrolü, süreç yönetimi ve veri yönetimi aşamalarında etkin rol oynar. Robot uygulamaları, otomasyon sistemleri, motor kontrol devreleri, paketleme tesisleri, havalandırma ve soğutma sistemleri, otomotiv endüstrisi gibi birçok alanda kullanırız.
2.1.1. PLC’nin Yapısı
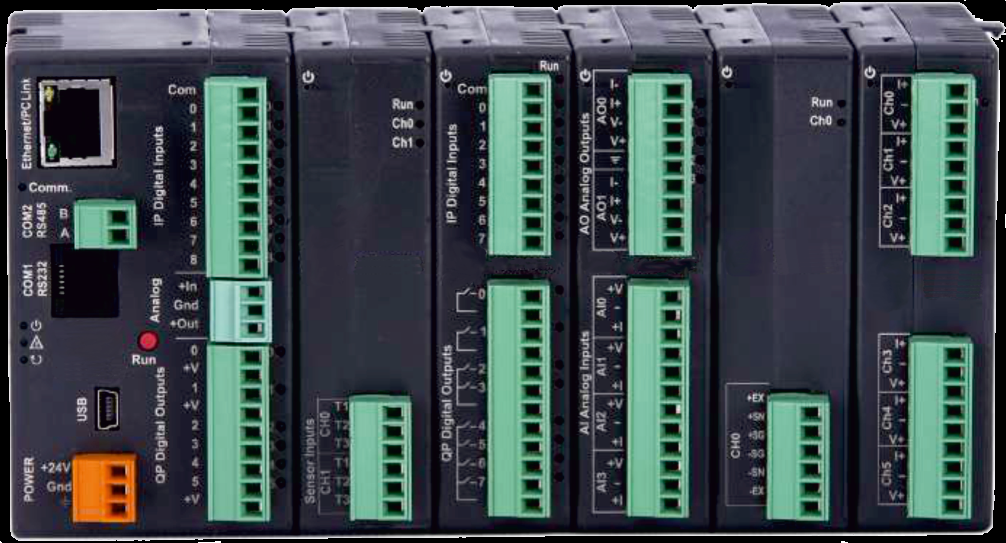
PLC genel olarak merkezî işlem ünitesi (CPU), giriş çıkış ünitesi ve besleme (güç) ünitesi olmak üzere üç ana bölümden oluşur. Üretici firmalara göre PLC yapı tasarımı farklılık gösterir (Görsel 2.2). PLC besleme gerilimleri genellikle DC 24 V veya AC 230 V’tur. İhtiyaca göre modüller kullanılarak ilave özellikler eklenebilir ve bilgisayar üzerinden PLC’nin çalışması takip ederiz.
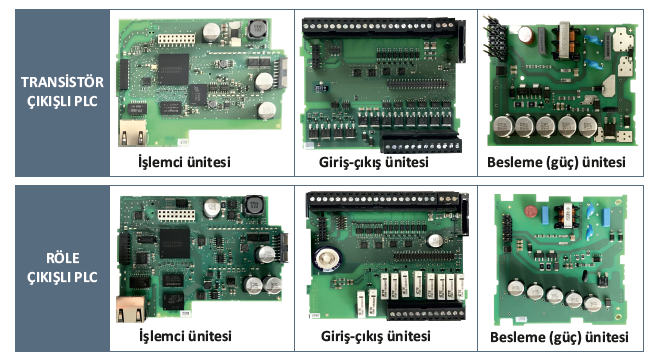
2.1.1.1. CPU ve Güç Ünitesi
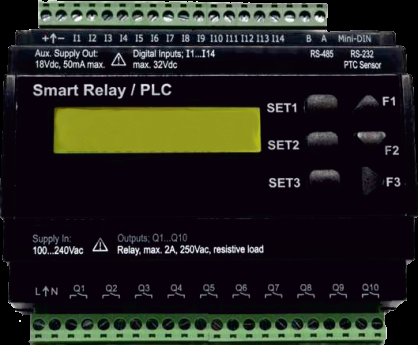
CPU; PLC üniteleri arasında iletişimi sağlayan, kontrol eden, girişten gelen verileri işleyerek çıkışa aktaran, oluşturulan programa göre işlemleri yürüten ve değerlendiren birimdir. PLC içinde dâhilî olarak bulunan güç ünitesi, CPU giriş ve çıkış birimlerini besler (Görsel 2.3).
2.1.1.2. Giriş Çıkış Ünitesi
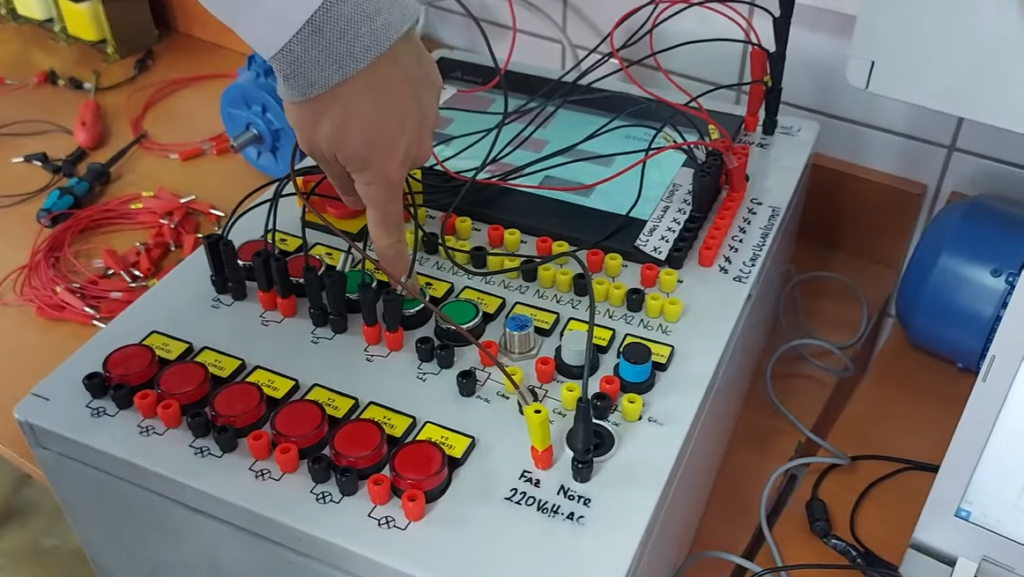
Giriş (Input) Birimi: Giriş elemanlarından (buton, anahtar, sensör vb.) gelen elektriksel sinyalleri CPU’ya aktaran birimdir. Alınan sinyaller, giriş modülünde CPU taratindan işlenebilecek hâle getiririz (Görsel 2.3). PLC giriş gerilimleri, DC 24 V ve AC 230 V gibi farklı tür ve seviyelerde olmakla birlikte genellikle DC 24 V olarak kullanırız. Giriş terminalleri ve CPU, giriş biriminde bulunan optokuplör gibi elemanlarla elektriksel olarak birbirinden yalıtırız. PLC’lerde dijital ve analog olmak üzere iki farklı giriş buluruz.
· Dijital Girişler: Dijital giriş sinyallerinin uygulandığı kısımdır. Bazı dijital girişler yüksek hızlı sinyalleri algılayacağımız özelliktedir. Girişlerin yavaş veya hızlı algılanması yazılımla ayarlanır.
· Analog Girişler: Analog giriş sinyallerinin uygulandığı kısımdır. Analog girişlerde 0-5 V ve 0-10 V seviyelerindeki gerilim ya da 0-20 mA ve 4-20 mA seviyelerindeki akım sinyalleri kullanırız.
Çıkış (Output) Birimi: CPU taratindan işlenen bilgiyi çıkış elemanlarının çalışabileceği gerilim seviyelerine dönüştüren birimdir. Dijital ve analog çıkış olmak üzere iki tiptir ya da farklı çalışma şartları için dijital çıkışlar transistörlü ya da röleli olur.
· Transistörlü Çıkışlar: Anahtarlama hızları yüksektir. Bu sebeple sık devreye girip çıkan çalışma alanlarında tercih ederiz. Mekanik aşınmaları olmadığından ömürleri uzundur ve 0,5 A gibi DC
akım taşıma değerine sahiptir.
· Röleli Çıkışlar: Anahtarlama hızları düşüktür. Çıkış röleleri 2 A gibi akım taşıma değerine sahip-
tir. Çıkışlarına DC ya da AC ile çalışan son kumanda elemanları bağlarız. Bu sebeple farklı
gerilimlerde çalışan elemanları kontrol etmek kolaydır.
· Analog Çıkışlar: Analog çıkış sinyallerinin alındığı kısımdır. Analog çıkışlarda 0-10 V
seviyelerindeki gerilim ya da 0-20 mA ve 4-20 mA seviyelerindeki akım sinyalleri kullanırız.
2.1.2. PLC’nin Çalışması
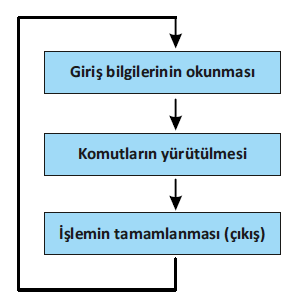
PLC’de programın yürütülmesi belirli işlemlerin periyodik çevrimiyle gerçekleştiririz.(Görsel 2.4).
PLC’nin girişten algılanan sinyalleri değerlendirip ya da ara işlemlerden sonra tekrar girişe aktarılmasına kadar geçen süreye tarama süresi ya da saykıl denir. Tüm işlemlerin gerçekleşmesi için geçen zamana da tarama çevrimi adı verilir. Tarama çevrimi, PLC’nin enerjisi kesilinceye ya da PLC STOP konumuna alınıncaya kadar sürekli tekrar eder. Bir tarama çevriminin süresi PLC çalışma hızına ya da kullanılan komutların niteliğine ve kontrol programının uzunluğuna göre değişir.
PLC’ye enerji verildiğinde PLC işletim sistemi programını çalıştırır ya da Dâhilî kontrollerin ardından hata yoksa ve PLC çalış (RUN) konumundaysa şu sıralı işlemleri gerçekleştirir:
· Girişlere bağlı buton, sensör gibi elemanlardan alınan sinyaller okunarak belleğe kaydederiz.
· İkinci aşamada PLC işlemcisi, bellekte bulunan verilere ve kullanıcı programındaki komutlara
göre verileri işler ya da İşlem sonucunda oluşan yeni veriler belleğe yazarız.
· Üçüncü aşamada ise çıkış birimi, bellekten aldığı yeni verilere göre kendisine bağlı olan röle,
kontaktör gibi elemanları çalışrır ya da Böylece bir tarama çevrimi tamamlanır. Çevrim, PLC stop
konumuna alınıncaya kadar devam eder.
2.1.3. PLC Giriş ve Çıkış Adreslemeleri
PLC giriş çıkışlarının bağlan ve programlamada kullanılmak üzere isimlendirilmesine adresleme
denir. Üretici firmalar giriş çıkış adreslemeleri için farklı harf ve sayı sistemleri kullanır. Örneğin bir PLC
modelinde giriş-çıkışlar sekizli gruplar hâlinde düzenleriz ya da Adresleme bayt-bit sayıları cinsindendir.
Girişler için I, çıkışlar içinse Q harfleri kullanırız. Bu harflerin ardından bayt ve bit numaraları gelir. Bayt
ve bit ayrımı için bir nokta (.) kullanırız. Görsel 2.5’te görüldüğü gibi I0.4 adresinde; I giriş adres alanı
tanımlayıcısı, 0.4 ise 0.bayn 4. biti olduğu anlamına gelir.

2.1.4. PLC Seçiminde Dikkat Edilecek Hususlar
PLC, yapılacak işe uygun seçeriz. Bu sebeple kullanılacak PLC’nin seçiminde aşağıda verilen yapı özelliklerine dikkat ederiz ya da
-Giriş sayısı ve _pi (PNP, NPN) ya da
-Çıkış sayısı ve _pi (röle, transistör) ya da
-Haberleşme özellikleri (Profinet, RS232, RS485, USB vs.) ya da
-Besleme gerilim türü (AC, DC) ya da
-İşlemci hızı ve hafıza kapasitesi ya da
-Genişleme imkânı ve diğer sistemlerle uyumluluğu ya da
-Kullanım kolaylığı, bakım hizmet ağı ve maliyet ya da
ENDÜSTRİYEL SENSÖRLER İÇİN TIKLAYINIZ.
KOMPANZASYON PANO BAKIMI OLMAZSA NE OLUR YAZISI İÇİN TIKLAYINIZ.
https://izmirkompanzasyon.com/kompanzasyon-pano-bakimi-olmazsa-ne-olur